工业机器人技术解密之——仿真技术在机器人系
2017-02-15 10:40 [工程机械] 来源于: 广州启帆工业机器人
导读:工业机器人在现代制造系统中起着极其重要的作用。随着机器人技术的不断发展,机器人的三维仿真技术也随之得到广泛关注。通过预先对机器人及其工作环境乃至生产过程进行模拟仿
|
工业机器人在现代制造系统中起着极其重要的作用。随着机器人技术的不断发展,机器人的三维仿真技术也随之得到广泛关注。通过预先对机器人及其工作环境乃至生产过程进行模拟仿真,将机器人的运动方式以动画的方式显示出来,直观的显示机器人及整个生产线的运动情况,能够有效地辅助设计人员进行机器人虚拟示教、机器人工作站布局、机器人工作姿态优化。
(1)启帆工业机器人系统介绍
启帆工业机器人系统主要由机器人本体、机器人控制器和机器人控制软件三部分组成,如图1所示。机器人控制系统是先通过示教器来操作运动控制器,运动控制器则通过EtherCAT通信向伺服驱动器发出指令来控制机器人六个轴分别运动,实现机器人的运动控制。
STS-R6-ECAT控制器由广州启帆开发,借助德国3S公司的RTE实时内核实现虚拟PLC功能。该控制器具有接口紧凑,通用性高等特性,并采用EtherCAT通讯接口实现控制器、IO模块以及伺服驱动的数据通讯。

图1启帆工业机器人系统
机器人控制软件(如图2)是由广州启帆独立开发,主要包括机器人手动、自动控制、机器人应用程序开发、机器人三维仿真运动等功能。其中机器人三维仿真功能是该控制系统的独到亮点,可实现先仿真后运行;通过机器人三维仿真能够比较直观的观察机器人状态和行走路径,有效的避免了机器人运动限位、碰撞和运动轨迹中奇异点的出现。通过将机器人仿真程序直接集成到控制器中,保证了仿真结果与机器人实际的运行情况完全真实可靠。
 图2启帆机器人控制软件
(2)机器人三维仿真技术
机器人仿真系统作为机器人研究和开发中安全可靠、灵活方便的工具,发挥着越来越重要的作用。在仿真环境下,通过对机器人运动进行研究及编程验证,可以实现机器人轨迹规划、奇异位姿、逆运动学有效解、避障算法、甚至多机器协调作业等复杂功能。
若采用传统示教器操作机器人,当机器人改变工作任务时,通常需中断机器人的当前工作,先对机器人进行示教编程,然后机器人按照新的程序执行新的工作。而启帆公司开发的新型示教器,借助于机器人仿真系统就可首先在仿真系统上进行离线编程,并通过仿真环境验证程序是否正确。最后将编好的程序装到机器人执行器中,机器人便可按照新的程序执行新的工作,因此机器人可不必中断当前的工作,从而提高了生产效率,而且这种方法既经济又安全。
图3中的三维仿真是小屏模式,可以实现边编程边仿真功能,能够避免不必要的错误。三维仿真图中上侧显示各轴位置信息,坐标下方显示完整轨迹运行周期。轴位置信息根据坐标系不同而不同,关节坐标时显示关节信息,基坐标及其他坐标显示空间位置。
 图3机器人三维仿真小屏模式
如图4所示为三维仿真全屏模式,图中机器人正按照程序进行自动仿真运行(虚轴),同时还可以清晰的看到机器人末端运行轨迹。其中虚轴即为仿真模式,实轴为机器人实际运行模式,该模式下实体机器人进行作业,与此同时仿真机器人进行精准同步运动;实虚轴切换通过图中右侧的虚轴实轴按钮进行切换。
 图4机器人三维仿真全屏模式
(3)运行实例
为了保证机器人正常作业,首先采用“虚轴”模式(如图5)试运行观察机器人行走轨迹,并判断机器人运动是否会出现正负限位或者速度限制等报警信息;确认程序无误后,在确保使能断开的情况下切换到“实轴”模式(如图6)进行实体机器人运行。

图5运行实例——“虚轴”模式

图6运行实例——“实轴”模式
(4)定制案例
启帆机器人控制软件中的仿真系统可以根据用户需求进行定制,如在仿真系统中为机器人末端法兰盘加装用户指定的工具并导入相应要加工的工件,甚至整个生产线等。下图是为某高校定制的启帆机器人仿真系统实验平台。

(a)启帆机器人仿真系统实验平台——小屏模式

(b)启帆机器人仿真系统实验平台——全屏模式(前)
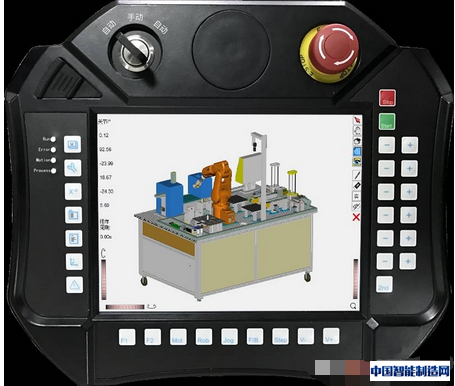
(c)启帆机器人仿真系统实验平台——全屏模式(后)
(编辑:admin) |
 江苏苏州:推动工
江苏苏州:推动工 ST工智:智能制造
ST工智:智能制造 聚焦高质量发展丨
聚焦高质量发展丨 全球工业机器人飙
全球工业机器人飙 智能制造开启新征
智能制造开启新征












