在解释此项技术的论文中,研究人员表示“机器人通过对足中心施展压力来探索接触面,根据探索阶段中足的旋转勾画出可以受力的平衡点”。通过探索和计算,机器人可以决定如何“踩下去”。它还会通过上身的运动,比如挥胳膊,来保持或找回平衡。在测试中,它可以走过崎岖不平的水泥砖路。

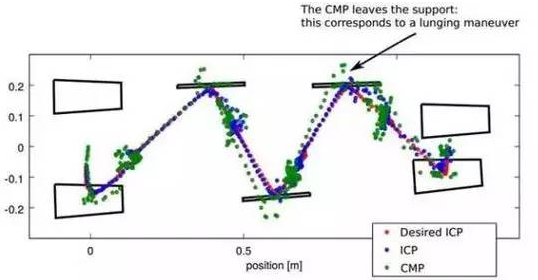
Atlas机器人从左向右行走(俯视图)的地面参考点实际数据:黑色多边形指线拟合的落脚点区域,红点指预期的瞬时捕捉点(Desired ICP),蓝点指实际瞬时捕捉点(ICP),绿点指的是机器人的质心矩轴(CMP)。(DeepTech深科技)